ロケット用センサボード設計した【MTM07に出展予定】
趣味の電子工作ネタ。ブログの文体を統一できない系男子です。
今週末東京工業大学で行われるMake Tokyo Meeting(MTM07)という素人?の電子工作やなんだか面白いものを作ってる人の展示会に『はかるひと』という団体名で『加速度ジャイロ』の展示をします。
fenrirさん、HirakuTOIDA さん両氏がすごいもの展示するのに混ざる形です。
設計したもの
今自分たちが作っているようなロケットやモデルロケットは瞬間的な加速度や勢い良くスピンしたりすることがあってそういうところを計測できると機体の特性がよくわかったり、エンジンの特性がわかったり色々なことがわかります。精度も上がればロケットの姿勢がわかるので制御みたいなことの礎になります。
ただ、現在sparkfunなどで安く売られている慣性計測装置(IMU)と呼ばれるものはデータ取得間隔が広すぎて瞬間的な値がわからなかったり、高加速度は得られなかったりします。
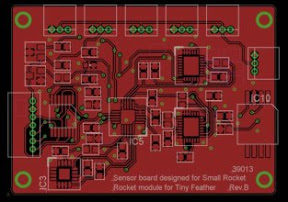
ここらへんを上手く取れるように使いやすいセンサボードを設計してみました。
Super SylphideやTiny Featherという無人航空機(UAV)用のオートパイロット装置を開発しているfenrirさんを師匠として、Tiny Featherの拡張モジュールとして設計しました。
飛行機用だったTiny Featherをロケット用にも使えるようにするというプロジェクトです。
高性能なTiny Featherに載っかることによってスーパーなことができるようになるはずです。
専用の拡張モジュールとしてだけではなく、レギュレータで電圧を落としているので3.3Vから5Vまで入力電圧が使えるし、SPIで出力しているので汎用性は高くなっています。適当なマイコンに繋げてやってデータを取ることができます。
今はFusion PCBに基板を発注、Digikeyに部品発注で共に到着待ちの段階です。
MTMは今週末なのにまだ届いてないということで、がんばっても動いているところは展示できるかどうかってところだけど、一緒に展示している人たちがすごすぎるのでいいかなぁっと笑
測れるもの
- 加速度 ±19[G]
- 角速度 500[deg/sec]
- 気圧(絶対圧) 平地から高度14kmぐらいまで(よくわかんない)
- アナログ出力の外付けセンサ6ch
これらを高分解能な16bit精度で1秒間に1000回以上測れる予定です。
大きさも長辺5cm、短辺3.5cm程度なのでかなり小さいです。