2012年3月CREATE大島での打ち上げ
研究室のタスクがそこそこあって、就職活動などしていて久々の更新。
3月18日に伊豆大島の裏砂漠で所属しているロケットサークルCREATEの打ち上げを行って来ました。
CREATEという名前で活動し始めてから3機目の打ち上げでした。
1機目は2011年の6月に打ち上げ、パラシュート分離が動かず弾道飛行で大破、
2機目は2011年の8月に打ち上げ、こんな感じでした
今回の打ち上げ
今回の打ち上げの目玉は
自作のハイブリッドロケットと缶サットの1サークル内での同時開発。
缶サット
缶サットは詳しくは以下のリンクのPDFにあります。
G-Sat2制作・運用報告書(Googleドキュメント上のPDF)
簡単に言うと中に無重力を作ろうという缶サット。
- ロケットの放出から安定させるための機構
- 展開式の翼
- CFRPやレーザー加工されたアクリルを使った軽量構造
- リアクションホイールでのロール方向の制御
が目玉な缶サットでした。
手前味噌ではあるけどすごい缶サットです。
ロケット
使用エンジンはHyperTEKのJ型のもの。
ロケットの方はCFRP(カーボン繊維強化複合材料)で主な部分は厚み0.4mmでネジ止めなど応力が集中的にかかる部分は厚み1.2mmでプリプレグから自作しました。
分離機構は新規設計で開発しようとしたが、信頼性のために実績のある分離機構を制作した。






ロケット用センサーボードに部品実装してみた
電子工作ネタの進捗です。
以前MTM07にこっそり展示していたセンサボードですが、回路に不備があったのでRev.Bを発注した後、部品を実装してみました。



かっこ良くできたのでお気に入りです。
加速度センサとジャイロセンサのハンダ付けが難しく時間がかかりましたがホットエアーを使用して、その他は手ハンダで実装しました。
実装の後、TinyFeatherというオートパイロットシステムの一部として使えるようにという計画の下、Fenrirさんの秘密基地にお邪魔して火入れを行いました。


デバッグ用にコネクタを作って、Arduinoに繋げて動くかどうか試験を行なっています。
ひっくり返したり振ったりしてみると、それっぽい値は出ているので一安心です。

XROTORの使い方 -実践編1- 人力飛行機プロペラ
前回XROTORの解説を書いたけど、自分でもわけわからないので、簡単に人力飛行機を想定して設計の真似事をしてみる。
流れ
設計要求決定 → XFLR5で翼型解析 → XROTORで翼性能モデル化
→ XROTORで設計 →XROTORで解析 → 修正&解析×∞ → 要求を満たせば完成
設計要求
ブレード数、プロペラ直径、ハブ直径、機体速度、回転数、推力を決める。
このパラメータを色々と変えて全体の最適を決めるのが筋だが、持続的に飛べる機体と短時間の速度を求める機体の2つを簡単に考えてみる。
データは低速機は東工大Meister、高速機はTeam’F’を参考にさせてもらいました。
http://www.meister.ne.jp/reports/prop/2011/12/post-22.html
http://tt-team-f.blogspot.com/
今回はこういうのを入力した。
| 要求 | 低速機体 | 高速機体 |
| プロペラ直径[m] | 3.0 | 2.7 |
| ハブ直径[m] | 0.11 | 0.12 |
| 機体速度[m/s] | 7.0 | 10.5 |
| 回転数[rpm] | 135 | 200 |
| 推力[N] | 26 | 23 |
| 翼型 | DEA51+GEMINI | 同左 |
翼型解析
正確に行おうと思うと風洞試験のデータを持ってくるか、自分で試験を行なう必要がある。XFLR5などの翼型解析ではしばしば揚力係数が大きく出すぎることや抗力が小さく見積もられることがある。
今回は簡単のためにソフトウェア上で解析を行う。
今回はDEA51と根元はGEMINIという人力飛行機のプロペラではよく使われる翼型で考えてみる。
使用されるReや構造的な都合などによって使われるべき翼型が変わるので変更するか変形することもあるがあるが、ここで簡単にこの翼型で決め打ち。
http://www.ae.illinois.edu/m-selig/ads/coord_database.html
などの翼型データベースからそれぞれをDLしてきて、拙記事など参考にしてXFLR5で解析を行う。
注意すべきところとしては後縁にギャップがあるのでこれを直しておくこと。

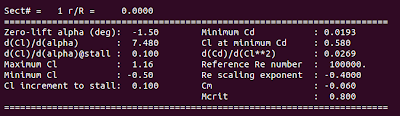
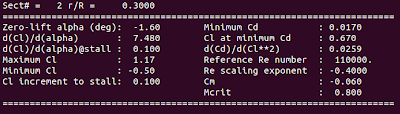
Cl vs Cd と揚力曲線などを見て、XROTORの翼性能のモデル化の材料にする。
下図だと沢山のReで解析しているが、その必要はあまりなくてXROTORのAEROメニューではReの変化も折り込みずのモデルが作られる。
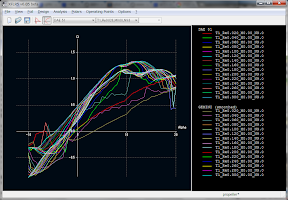
グラフからQPROPの拙記事の下部分のように値を読み取る。
解析しない場合、風洞試験のデータは下のような本から持ってくる。
http://www.ae.illinois.edu/m-selig/uiuc_lsat.html
翼性能モデル
これをXROTORのAEROメニューの中に入れる。
ここでは根元部分から30%まではGEMINI、40%までにDEA51に遷移して翼端までDAE51を使うのをイメージして以下のようにaero sectionを設定。



設計
DESIメニューのINPUコマンドで先ほどの設計データを入れる。
ここでのポイントは揚力係数をいくつにするかである。
一つには揚抗比を最大にする方法。もう一つは失速までに余裕を持って揚力係数を定める方法がある。
性能が良くなるのは前者だが、製作精度が厳しく取れず、回転数や飛行状態が変わりやすい人力飛行機にとって失速しやすかったり、性能がピーキーになりがちになる。なのでよりロバストな性能をもつ後者で考える。ここでは揚力係数一定の”0.6”で考える。
揚力係数を1.0などに設定すると翼弦長が短くなりすぎてRe数が下がって性能がわるくなるのを気にしているという側面もある。
厳密には翼型の変化で段差ができないように揚力係数を調整する方がいい。

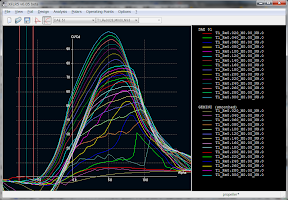
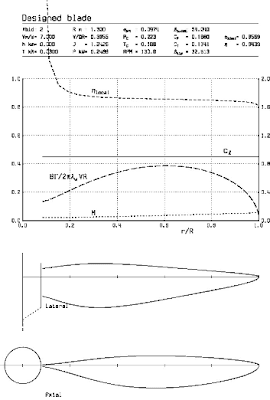
PLOTコマンドで設計されたプロペラの表示を行い、HARDコマンドでPostscript形式で保存を行う。

解析
設計が終わるとOPERで解析を行う。例えばかいつまむと。
- RSEQ : 回転数変化したときの性能を見る
- BSEQ : 取り付け精度によって性能がどの程度劣化するか見る
- VSEQ : 機速の変化
などで解析をかけておいて各種データを得る。
修正と解析の繰り返しを経て完成
要求を満たしているか、制限の中でさらに良い性能のものがないかの探索して、満足できるまで修正。
この場合どちらも効率88%程度になったので完成良い性能なのがわかる。


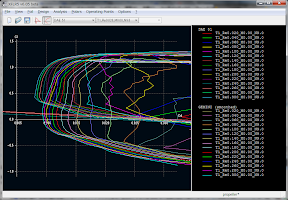
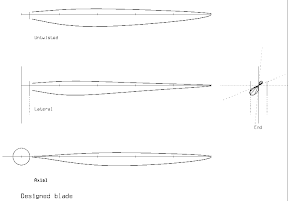
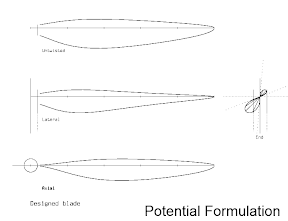
設計法による違い
DESIメニュー中でINPUコマンドやEDITコマンドを行うときに
- Granded Momentum Formulation
- Potential Formulation
- Vortex Formulation
の3つから選択できる。
理論の違いによってこの特に根元付近に違いが出る。
Potential Formulationだと根元が太いが、Granded Momentum Formulationでは根元の翼弦長が0になっている。翼弦長がつぶれてしまうと製作できないので困り、Granded Momentum Formulationを使う場合は根元部分を変えてやらないといけなことがわかる。


プロペラ・風車の設計解析ソフトXROTORの使い方
[[]]
人力飛行機などのプロペラや風力発電用の風車の解析や設計をやりたい人向けの記事です。
ブレードが回転するものの設計ならかなり汎用的に使えるはずです。
CUIソフトなので少し取っ付きにくいですが、慣れれば短時間で細かく設計・解析ができます。
解説を書いていますが、関連論文を全部精読しているわけではないので間違っている所が多くあるかもしれません。
プロペラ解析・設計ソフトの概要
ソフトの製作者はMITのMark Drela教授。人力飛行機の長距離飛行の世界記録を持っているDaedalusの機体設計のために開発されたようです。
公式HPのユーザーガイドによると以下の機能があります。
- 誘導損失最小の回転翼の設計(プロペラや風車)
- 任意の回転翼の形状の入力
- 回転翼の形のインタラクティブな変更
- 任意の回転翼の誘導損失最小となるねじり角の最適化
- 回転翼の解析
- プロペラに入って来る流れの影響の考慮
- 構造解析と荷重がかかった状態のねじり角の解析
- 音響解析をした騒音範囲予想
- 幾何データや空力パラメータ、性能マップのプロット
回転翼の空力的な設計と解析に加えて、構造解析や音響解析もできる機能があります。