鳥人間コンテスト2011写真集め延長

前の記事で鳥コンでの写真集めをすると言っておいて自分の微妙な忙しさのためにすぐの対応できずに、認証保留になってしまった人もいるし、写真が放映後に増えたりしたので8月末までではなく、9月末まで共有期間にします。
写真見たいっていう人はまだまだ受け付けているので下から気軽にどうぞ
https://sites.google.com/site/toricon2011photo/
鳥人間コンテスト2011写真集め
鳥人間コンテストに今年も見学に行きます。
2週間前ぐらいに見たいものの一つが見れないということが分かり、モチベーションの大きな一部分はなくなったんだけど、後輩の頑張りを見たり、同窓会・オフ会気分でいろんな人に会えるのが楽しみなので行きます。
今年の鳥人間コンテストは
7月30日(土)人力プロペラ機タイムトライアル部門/滑空機部門
7月31日(日)人力プロペラ機ディスタンス部門
の日程で琵琶湖の松原海水浴場で行われます。
両日ともに湖畔でカメラを抱えてうろうろしている予定です。
昨年ぐらいから写真が薄っぺらながらも趣味になっているので、琵琶湖で写真を撮っている、みんなの写真がみたいということで写真集めをします。
現役で頑張っている人の資料になったり、思い出を残してあげたいなんていう、何様なのかわからない上からな気分です。
良いカメラを持ってる人が多いので写真下手な自分が勉強のためっていうのも少しあります。去年はもう少し細々をやっていましたが、うちのチーム独自のも合わせて5000枚を超える写真があつまりました。今年はどうなるのかワクワクです。
詳しくはここを見てください。
https://sites.google.com/site/toricon2011photo/
文体が記事によって変わるのが変な感じだと思うこの頃の更新です。
温度計作ってみた

大学でロケット作るサークルを主催してます。(突然
ロケットには電子工作が必要になってきて、新入生に電子工作を教えたいなと思い、基本的なことを学べる用に教材的に基板を設計してみた。機能のわりに大きいのはハンダ付け初心者にハンダ付けさせるためです。なるべく大きな部品使うようにしてますし。
基板は大学にある基板切削機という電子工作用のNCフライスで作った。相変わらず配線のセンスがなさすぎて悲しくなってくるが、反面教師的な部分も無いと教材っぽくないのでご愛嬌かなと。
前に作ったのと同様に
ArduinoのDuemilanoveやUNOに使われているATmega328PというマイコンにArduinoのブートローダーを書きこんで、電源系、セラロック(背面に取り付けてあるので見えない)を付けた。あとはATmega328Pのピン通りに配線した。本物のArduinoとブレッドボードでプロトタイピングをしておいて、本番として自分で作った基板に載せられる。ハンダ付けも簡単で、そこそこのモノが出来て、なにより完成が早い。
あとは
Arduinoで遊ぼう - PC用ファンの回転数を表示する
ここにある7セグLEDライブラリを使って、温度センサはLM60を使って作った。
間違ってアノードコモンを買ってしまったので、
上記のライブラリのSevenSegment.cppの
const uint8_t SevenSegment::NUMERICAL_NUMBER[] = {
の先を
/*0*/ SEG_G_BIT | SEG_DP_BIT,
/*1*/ SEG_A_BIT | SEG_D_BIT | SEG_E_BIT | SEG_F_BIT | SEG_G_BIT | SEG_DP_BIT,
/*2*/ SEG_C_BIT | SEG_F_BIT | SEG_DP_BIT,
/*3*/ SEG_E_BIT | SEG_F_BIT | SEG_DP_BIT,
/*4*/ SEG_A_BIT | SEG_D_BIT | SEG_E_BIT | SEG_DP_BIT,
/*5*/ SEG_B_BIT | SEG_E_BIT | SEG_DP_BIT,
/*6*/ SEG_B_BIT | SEG_DP_BIT,
/*7*/ SEG_D_BIT | SEG_E_BIT | SEG_F_BIT | SEG_G_BIT | SEG_DP_BIT,
/*8*/ SEG_DP_BIT,
/*9*/ SEG_E_BIT | SEG_DP_BIT,
に変えて、
void SevenSegment::digitOn(void)の関数の中身を
digitalWrite(_digitPins[_currentDigit], HIGH);
void SevenSegment::digitOff(void)の関数の中身を
digitalWrite(_digitPins[_currentDigit], LOW);
にそれぞれ変更した。
やってることは
1.アノードコモンとカソードコモンで点灯時の電圧のHIGHとLOWが逆なので逆にした
2.元のライブラリでは表示させるLEDの場所を指定していたのを、逆に消すLEDの場所を指定した
というだけ。
温度センサは2つ。基板に取り付けたものと、ケーブルを伸ばした先の温度を測るためのもの。(写真は後者を取り付ける前)
気温ですら1℃ぐらいの誤差があるけど、外付けの温度計も切り替えて測れるようにしたので、実用性はあるかなと思う。
100円ショップで温度計が買えるこの時代に800円程度かけて温度計自作するのは悲しくなるけど、それ以上に工作が楽しくて、達成感と勉強できて良かった感は他の何にも変えられないものです。
ワークショップ

【追記】ワークショップ形式でサークルで新入生に作ってもらった。基本的なことを教えながら作ってもらった。同じ基板で同じセンサ・プログラムでも表示される温度が変わってくることなんて、本を読んで勉強してるだけでは理解できないことなので良い教材になったかなと思った。
簡単なハンダ付け練習とLEDチカチカさせて、LCDにHelloWorld表示させた後にこのレベルだとプログミング辺りに少しレベルの乖離があったみたいだけど一日でかなりの達成感を感じてもらえてモチベーション上げてもらえたので良かったかなと。電子工作は修行のような忍耐強さが必要なので、マイコンいじるのが好きになってもらえるのが何よりだった。
XFLR5翻訳プロジェクト
前にXFLR5のドキュメントを日本語化してた記事からの続き。
※<<2011-11-08追記>>
翻訳作業の訳語検討や統一のためのページ作りました。
http://www52.atwiki.jp/xflr5japanese/
<<追記終わり>>
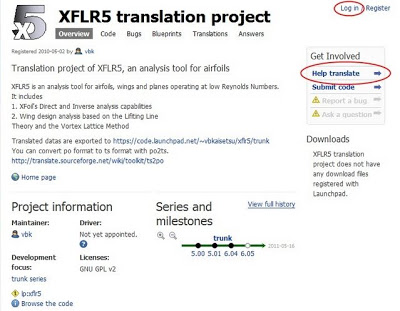
vbkさんがXFLR5を日本語化しようとプロジェクトを立ち上げてくれました。
https://launchpad.net/xflr5
複数人が翻訳作業に参加すれば、誤訳も少なくなるし自分が飽きたから翻訳終了とならずに続くと思います。
ここに登録(Register)してHelp translateからwebブラウザ上で翻訳作業ができる。
翻訳したデータは
http://bazaar.launchpad.net/~vbkaisetsu/xflr5/trunk/files
にpo形式で出力されるので、po2tsというソフトウェアを用いてXFLR5で使われているts形式に変換できるらしい。
http://translate.sourceforge.net/wiki/toolkit/ts2po
訳に自信がなくてもみんなで確認しながら翻訳できるので、是非参加してください。
自分も空いてる時間にポチポチとやっていきます。
暫定ファイル
これとは別にqtlinguitというソフトを使って自分で翻訳ファイル作ったのですが、メインフレーム以外の翻訳が反映されないようなので困っていました。
自分の環境だけなのかわからないので教えてください。
暫定的なファイルですけど置いておいきます。
このqmファイルをXLFR5のtranslationsフォルダの中に入れてOption→languageで変更できます。
http://db.tt/zyO9nE3
ロケット用の慣性計測ユニット作ってみた
作ってみたったら作ってみた。

2011年6月4日に自分たちで作ったロケットを伊豆大島で打ち上げてきた。
詳しいことは別のページに書くことにして、久々に面白い(exciting)作業ができたのでブログにしてみる
自分たちが作ったロケットがどのように飛行したのか、どこまで飛んだのか、機体にどのような変化があったか、これらがわかるとただ単に打ち上げて楽しかっただけではなく工学的な面白さが出てくる。
ということで慣性計測ユニットを作ってみた。
諸々の都合があって、開発にかけられる時間は非常に限られていた。
今回書く慣性計測ユニットだけではなくパラシュート分離機構用のタイマー作りや普段の研究室生活、ロケット打ち上げまでの事務一般、ロケット本体の仕上げなどの作業をしながら2週間弱しか開発期間がなかった。無給のブラック企業を素でいくぐらいの忙しさだった。
このため、開発の工数を少なくして、新しく勉強することを最小限にしながら自分が満足できるクオリティのものを作ることをコンセプトにした。
マイコン
AVRのATMEGA328PにArduinoのブートローダを書きこんでDIPのマイコン単体でArduinoとして動かした。
28ピンのAVRのICに3端子レギュレータから5VのVccとGNDと16MHzのセラロック(発振子)だけを付けてやればArduinoとして動く。
ピンの役割などはATMEGAのデータシートを見ながら動かした。
3.3Vの電源が取れないだけでそれ以外はArduinoとして動くのでロケットに積むために小型化したい要求と開発が早くて簡単だという要求を満たしていた。
搭載センサ
センサによっては3.3V駆動だったり入出力がRS232Cレベル(3.3V)だったりするのでセンサへの入力になる部分は分圧抵抗を入れて5V→3.3Vにした。
気圧センサSCP1000
秋月で買える気圧センサで測定範囲300hPa〜1200hPaで2Hz程度で出力が取れるので高度計として使用した。
大気圧1013hPaとしてざっくりと10mで1hPaの変化があるのに分解能が1.5Paあるということで理論的には分解能15cmぐらいがわかるはずと思って採用した。
実際はノイズがあったり、風が当たると動圧で気圧が変化するなどがあり、建物1階の高さの判別ができる程度だった。つまり、3mの違いはセンサから読み取れる。
SPI通信で値が出てきてくれるのも使いやすかった。
3軸加速度+3軸ジャイロセンサ
SparkfunのIMUフュージョンボードを使用した。
IMU3000(3軸ジャイロセンサ)とADXL345(3軸加速度センサ)を合わせたもので、両方の値がI2Cで取得できる。
レジスタを最初にいじれば最大加速度などを変えられる。値段が少し高いが5G以上の加速度を取得したく、勉強する時間がない、実装をいかに早くできるかが勝負という今回の目的に非常によく合っていた。すごく小さいし。
最初はわけわからなかったが、データシートをしっかり読みこんだら使えた。
GPSモジュール
秋月のGPSモジュールGT−723Fを買ってたが、逆起電圧をかけてしまったのか、何時まで経っても衛星を補足してくれないただの金属片になってしまったので泣く泣くその場にあったGT−720Fを使用した。
RS232Cレベルの出力だったがArduinoのピンにそのまま接続して大丈夫だった。
入力部分は分圧抵抗で3.3V近くまで落としている。
ArduinoにTinyGPSというライブラリがあったので複雑になりがちなGPSの出力を比較的簡単に扱えた。
温度計LM35
ロケットエンジンの酸化剤周りは充填中と点火後にそれなりの温度変化があるのでどの程度なのかがわかると酸化剤の蒸気圧から燃焼圧だったりがわかる。
その目的のために秋月で買えるLM35をAnalogINのピンに繋げて使った。
これはA/D変換するだけで温度がわかるので一番簡単だった。
キャリブレーションはするヒマが無かったが見た感じは何もしなくてもそこそこの精度の値は出てる気がした。
SDカード
データを保存したかったのでSDカードを付けた。
SPI通信の口が1つしか無かったのでデータロガー用の2つ目のATMEGA328Pを用意し、一つ目とシリアル通信しながら貯めたデータをマイクロSDカードに保存するようにしたかった。
SDカードになんでもないデータを書きこむことは出来たが、最後までデバッグが間に合わなくて目的は達成できなかった。根本的に勉強不足すぎてよくわからないままだった。
結局AVRの内部のEEPROMに打ち上げから2分のデータを保存するようにして対処した。
値段
6軸の加速度・ジャイロセンサとGPSモジュールが高かったがそれ以外は秋月・千石で買えば安く作れた。
1.5万円ぐらいで全部作れた計算になる。実際は余分な部品を買ったりで3万円ぐらい使って開発したので金欠な自分にはキツい出費だった。
基板
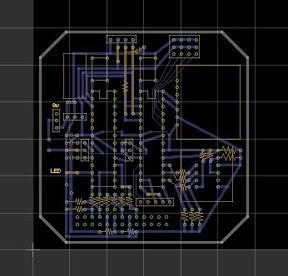
学校にあった基板切削機という機械で基板を作った。
初めてだったのであまり上手とはいえない設計になったが非常に楽しく基板を作れた。
画像はmbeというソフトで設計した基板
精度とか校正とか試験とか
これがすごく重要なのだが開発の期間が短すぎて手がつかなかった。これが心残り。
完成したところ
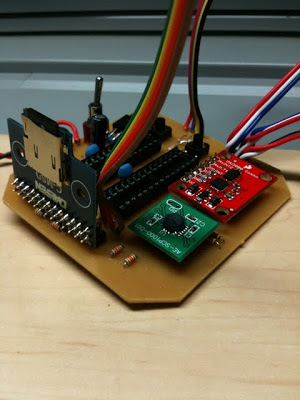

今までLEDチカチカさせて喜んだり、小物を作って満足したりしてたぐらいの電子工作経験だった。その段階から一気に本格的に趣味としての電子工作が出来たので心底満足した。これでもまだプロトタイプみたいな完成度なのであんまり外に出せるようなものではない。
打ち上げ後回収を失敗し、機体が大破してしまったので夏の終わりまでに作り直してver.2の進化したものを作りたいと思った。
尊敬するfenrirさんが作っているような慣性航法装置が理解できるようになるまでは続けたいところです。
ダイダロス研究
更新日の今日が人力飛行機Daedalusが飛行距離世界記録を記録した記念日だったのでページ作ってみる。
Daedalusプロジェクト概要
MITの航空宇宙工学部によって進められたプロジェクト。
世界記録を作ったのは1988年4月23日。
飛行距離:115.11km
滞空時間:3時間54分
の記録でギリシャ領クレタ島のイラクリオンを出発してサントリニ島に到達して終了した。
20年経つ現在でもFAIに人力飛行機の飛行距離及び滞空時間の世界記録として記録されている。
ダイダロスというのはギリシャ神話でロウの翼で太陽を目指して飛んでいったイカロスの父である大工で発明家のダイダロス(巧みな工人の意)からきている。
人を飛ばすための技術を冠した名前としてはこれ以上ない立派なものだと思う。
Daedalusプロジェクトでは3機の人力飛行機が作られた。
- Light Eagle(正式名称Michelob Light Eagle):ダイダロスのための試作機
- Daedalus 87:1988年2月17日にカルフォルニアにあるNASAドライデン飛行研究センターがあるロジャース乾燥湖で試験飛行中にクラッシュした。後にDaedalus 88のバックアップとして修復された
- Daedalus 88:世界記録を作った機体
すべての機体はマサチューセッツ州のボストン郊外にあるハンスコムフィールドにあるMITのリンカーン研究所で作られた。チーム構成は学部生と大学院生、教授陣である。
現在は
Daedalus 87はワシントン・ダレス国際空港で展示されている。
Daedalus 88はスミソニアン博物館に保管されている。
そしてLight Eagleはヴァージニア州のマナサス市に保管されていたが、2008年からダイダロスプロジェクトの参加者が設立したオーロラフライトサイエンス社によって高高度試験プラットフォームとして太陽電池駆動無人機として使われている(使われていた?)。写真を見る限りランディングワイヤーが新たに取り付けられているようだ。その他無人機にするために構造は変えずに他の部分で大きく改造されているようだ。
http://www.aurora.aero/advancedconcepts/SLE.aspx
参考
http://kidachi.kazuhi.to/blog/archives/003927.html
http://dobonkai.blog99.fc2.com/blog-entry-27.html
http://youtu.be/wV9CkJLKWIE
http://www.flickr.com/photos/kazuhito/sets/72157603073511667/
記録
Light Eagle
1987年1月にエドワーズ空軍基地所属のGlen Tremmlによって当時の飛行距離、滞空時間の世界記録が作られた。59.9km、2時間13分。またトライアスロン選手だったLois McCallinによって女性記録として直線飛行距離、飛行距離、滞空時間の世界記録が作られた。飛行距離15.44km、滞空時間37分38秒。これらの記録はNASAのドライデン飛行研究センターでもエドワーズ空軍基地で達成された。
Light EagleのためにNASA、MIT、ユナイテッドテクノロジー社などから68.5万ドルの提供を受けた。
Daedalus 87
2機作られたダイダロスの1機目。前述のドライデン飛行研究センターで試験飛行中の右旋回するときにスパイラルダイバージェンスしてしまいクラッシュした。右翼と胴体とプロペラが破損したがDaedalus 88のバックアップ機として修復された。
Daedalus 88
記録を作ったときのパイロットはギリシャ人でオリンピック出場経験のあるプロの自転車乗りのKanellos Kanellopoulosだった。世界記録の出発点はギリシャ領クレタ島のイラクリオン飛行場。FAIの規定に則って自力水平発進した。飛んでいる間は基本的に高度5mから10m。複数の船にエスコートされるように飛行した。ゴールのビーチまで順調に航行した。しかしゴール直前になって陸近くになって風向きが変わり背風になった。背風のために飛行速度はでたが、コントロールが難しく観客がたくさんいる狭いビーチに正面から突っ込む危険性があった。そのためビーチに沿うような向きに尾翼を切ったが砂地の温度が高いために局所的なサーマルを受けて片翼に揚力が出てしまい海側に流されてしまった。また風によってテールブームが捻れたときにコントロールを失った。
結果、フライトは公式記録ではサントリニ島のペリッサビーチから7mの海で終わった。
より大きな地図で Daedalus 88 を表示
諸元
| - | Light Eagle | Daedalus 87/88 |
|---|---|---|
| 空虚重量 | 41.7 [kg] | 31.8 [kg] |
| 全備重量 | 109.8 [kg] | 103.9 [kg] |
| スパン | 34.75 [m] | 34.14 [m] |
| 翼面積 | 30.65 [m^2] | 30.84 [m^2] |
| アスペクト比 | 39.4 | 37.8 |
| 巡航速度 | 6.3 - 8.0 [m/s] | 6.3 - 7.6 [m/s] |
| 必要パワー | 0.30 [馬力]以下 | 0.27 [馬力]以下 |
完成まで
Phase1-1985年4月〜86年4月-実現可能性の検討
Daedalusプロジェクトは1985年4月から86年4月まで実現の可能性の検討を行っていた。このころのデザインはフェアリングの後ろにプロペラがあるものであった。鳥人間の人たちは中ペラと呼ぶ形態。
この頃Mark Drela先生はパイロットの体重の半分程度の重量の機体であれば大まかな近似において必要とする出力はパイロットの重量に比例することを示した。体重が450g増えると1.5W増えるという概算であった。
このことを知らずに昔自分で計算したことあったけど1kg増えると3W増えると出してたから細かい値は別にして長距離狙う人力飛行機ならこのぐらいの出力重量比になることがわかる。
この時期はクレタ島に行っての場所の確保とスポンサーの確保に相当の時間が当てられたようだ
Phase2-1986年4月〜87年4月-試作機Light Eagle
アンハイザー=ブッシュ(Anheuser Busch)というバドワイザーなんかを作ってるビール会社がスポンサーについてくれることになり、試作機の名前をMichelob Light Eagleにした。ミケロブ(Michelob)は同社のブランド商品のひとつ。Eagleは同社のシンボルマーク。英語圏の人がみたらビールっぽい名前に感じるのだろうか(笑)
この時期にDrela先生はXFOILを完成させて新しい翼型の検討をしていた。XFOILは必要なレイノルズ領域では風洞試験より精度が良かった。風洞では周りの壁や模型支持棒などの影響をうけるからだ。
この時期に翼の2次構造をつくるためのCNCのフォームカッター(熱線と土台をコンピュータ制御で動かしてスタイロを切る機械)が製作された。リブを切るだけではなく大きなブロックから前縁材を切り出すのにも使われた。この機械があるためにDaedalusプロジェクトには翼を担当するsectionが無かった。
CNCのフォームカッターを自作しているひとのリンクを貼りつけておく
http://rockhill-555.world.coocan.jp/bbs/joy-b/hobby-cnc.cgi?page:35=v
http://homepage2.nifty.com/modelicengine/h9100401.htm
http://nonnno.hobby-web.net/
http://www.teaser.fr/~abrea/cncnet/table/tables.phtml
http://www.hobbycnc.com/
同時にパイロットも決定された。5人のオリンピック出場級の人を集めて、訓練させた。危険が伴うので人集めには苦労したようだ。体力的には十分だったので体力作りとともにこのために作られたフライトシミュレータなどで飛行機操縦の経験を積ませることを重視した。
機体に何も積まないと水分や糖分、塩分がなくなって体力が切れてしまうので特別なドリンクが開発された。
http://www.fsinet.or.jp/~active-g/
のKoToNo Librarryから8.『ダイダロスプロジェクト 生理学的問題と解決』を参照。
Light Eagleは18人でのべ15000時間で作られた。これは18人が1日8時間フルタイムを100日ちょっとかかるぐらいの作業量。
Light Eagleが完成してから翼表面が層流であるかどうかの確認の実験が行われた。翼表面に粉末と液体の混合物を塗布して液体が乾くときに流脈線が視えることによって流れの遷移が確認できる。結果はXFOILで解析した通りの範囲で層流であることがわかった。ただ、翼端はエルロンがあったりと複雑な構造をしていたために前縁材部分で乱流に遷移していた。Daedalusでは密度の高いフォーム材が使われるようになった。
必要パワーの測定が行われた。滑空角を使って必要パワーを計算することはわずかな上昇気流によって影響を受けるために難しい。したがってプロペラシャフトにひずみゲージを貼りつけることによって必要パワーを測定した。
驚くべきことに高度3mから7.6mに変わっても地面効果の影響はなく、必要パワーは一定だった。
一番いい必要パワーの計測方法はパイロットの主観的な推定だが。
オートパイロットの検討
高度が一定になるようなオートパイロットも検討されていたが、高度計が信頼に値するものでなかったからつくられなかった。
Phase3 -1987年4月〜88年- Daedalus
ダイダロスのフレームはLight Eagleに比べて大幅に軽量化されえている。なぜなら荷重係数が3Gから1.75Gに変わったからだ。それにグレードの高いカーボン糸を使っている。しかもLight Eagleの翼端3.7mに付いていたエルロンもDaedalusにはついていない。
パイロット
全体
Weight analysis of the daedalus human powered aircraft(ダイダロス人力飛行機の重量解析)
↑がDeadalusの各部品の重量についてすばらしくまとまっているエントリーです。
片持ちの主桁の重量については元居たサークルで実績的に、もっと軽くできると反論できるが、それ以外は各部品が如何に極限まで軽量化されているかがよくわかる。
1次構造
尾翼
駆動
操舵
フェアリング


フェアリングの白く見える部分はケブラー繊維の複合材料(AFRP)で作られている。
長距離を狙う人力飛行機のフェアリング(パイロットを覆っている部分)は以下を意識して設計製作されていると思う。
| 狙いどころ | 対策 |
|---|---|
| 抗力の減少 | 前方投影面積減少・翼型工夫・精度向上・干渉抗力減少 |
| 横すべり方向の安定性 | 側方投影面積考慮 |
| 視界確保 | 透明素材の使用 |
| パイロット冷却 | インテイク・アウトレットの配置大きさ工夫 |
| 軽量化 | 構造の工夫・素材の選び方 |
最近の鳥人間コンテストに出る機体の多くがフェアリングノーズ部分に穴を開けてインテイク(空気を取り入れる部分)にしている。アウトレット(空気が出ていく部分)は翼型の再現と後縁の流れの剥離を嫌ってフェアリングの70%から90%の部分につけている。
一方ダイダロスは主翼の下、パイロットの頭の真上にインテイクが付いている。
ここに取り付けることで翼型によって加速されていない空気が入り、後縁に隙間を開けたアウトレットによって空気を出している。
加速された流れを入れて減速した流れを出すとその運動量分が抗力になる。Daedalusは空気の入出流によって速度が変わらないように上手く設計されている。
さらに、パイロットの発熱量と酸素必要量を計算して必要なだけの空気流入させている。入った空気は曲がり管を通してパイロットに直接フレッシュエアーが当たるようにしている。パイロットの快適性を求めると際限がないので必要なものを必要なだけ供給するように合理的に設計されている。
プロペラ
| - | Daedalus88 |
|---|---|
| プロペラ半径[m] | 1.7 |
| ブレード数[-] | 2 |
| 定常速度[m/s] | 6.7 |
| 回転数[rpm] | 110 |
| 巡航時入力パワー[W] | 200 |
| Cl[-] | 0.7 |
| Cd[-] | 0.015 |
| Cl0[0] | -4.0 |
| 翼型 | DAE51 |
プロペラの設計にはXROTORというソフトを使用している。XROTORは最近GPLのフリーソフトになったので自分でコンパイルすれば使える。
参考:XROTORがフリーソフトになってたのでUbuntu上で動かしてみた
xrotorのコンパイルについて
修正されたLarrabeeの手法では最適プロペラが根元の細くなったプロペラになるが、プロペラのスパーが入るように根元が太く調整されている。太くすることで根元のレイノルズ数が上がり、全体の効率は上がっているはずである。これは渦法での設計によってわかる。
計器
まだまだ更新予定。
リンク
XROTORがフリーソフトになってたのでUbuntu上で動かしてみた

XFOILの生みの親であるMark Drela教授のプロペラ設計のためのプログラムであるXROTORが今年になってライセンスがGNU GPLのフリーソフトになっていたので動かしてみた。
XROTORが先に開発されてしばらく商用シェアウェア、アカデミックはフリーのソフトとして存在していたが、そのあとモーター込みでの性能の計算プログラムとしてQPROPというソフトが作られてGPLで公開されていた。それに続く形でXROTORのGPLへのライセンス移行だった。
QPROPについては前の記事を参考にしてください。
XROTORでは飛行機のプロペラの設計と性能計算、風車の設計と性能計算が可能。
プロペラは修正されたLarrabee法という手法で設計される。
今あるのはソースコードだけなので自分でコンパイルして使っていく。
XFOILではソースコードからwindowsでの実行形式(.exe)が置かれるまで1年ぐらいかかったのでそれが待てる人は必要ないけど、すぐに使いたいって人への記事です。
具体的な使い方の記事とかはやる気次第で作るかも。
まず自分の環境。
メインはwindowsVISTA(笑)だけどコンパイルの簡単さとかを考えて仮想マシンのLinux上で動かそうとした。
OS:Ubuntu10.10(Oracle VM VirtualBOX上)
CPU:32ビット
コンパイル(ビルド)するのにFortranのコンパイラなどが必要なので
をインストール
※------追記------
ifortのインストールは必要ではありません。gfortranでもビルド(使えるようにする)は可能なのでインストールの簡単なgfortranをオススメします。下のifortのインストールの部分を省略して、途中でMakefileの中身をいじってやります。下に書いた赤文字追記の部分の変更をしてからmake ~~のコマンドに入ります。※------追記終わり------
gfortranは端末上で
% sudo apt-get install gfortran
でインストール完了。
ifortはここを参考に。
ただし今のバージョンだと多少違って、インストール後に
% . /opt/intel/bin/ifortvars.sh -ia32
と打たないとコンパイルできなかった。ログアウトしてもifort使いたいならホームディレクトリの.profilのファイルの末尾に
. /opt/intel/bin/ifortvars.sh -ia32
を追加する
libPltのところでXlib.hがないとか言われたから、ここのように
% aptitude show xorg-dev
でインストールされてるか確認して
% sudo aptitude install xorg-dev
でパッケージのインストールをする
※------追記2011-12-12------
上記は下の方じゃないと動かないかも
% sudo apt-get install xorg-dev
※------追記終了------
以上のインストールが出来たら
ここを参考にコンパイルしていく。
これは非常に有用でありがたい記事でした。
同じことを書くようだけど少しだけ違うので改めて書くと、本家サイトからXrotor7.55.tar.tgzを落としてきて解凍する。
解凍は
% tar -xzvf Xrotor7.55.tar.tgz
などのようにする。解凍されたフォルダの./plotlibに移動して
% cp config.make.SP config.make % make libPlt.a
これでlibPlt.aというファイルが出来る。その後./binに移って、
% make xrotor % make jplot % make jplote
としたらコンパイル通った。実は何度も試行錯誤してて、ここまでで半日以上かかったが、一度コンパイルしてエラーが出たら解凍されたファイルを削除し、解凍からやり直すことでエラー吐かないようになった。
※------追記------
初期設定だとifortというインテル製のFortranコンパイラを使う設定になっているが、ifortのインストールは少しめんどくさいのでgfortranというコンパイラを使うやり方。下記の変更をしてからmake ~~をするとエラーが出ないはず。
./plotlibにある「config.make」というファイルの16行目を
FC = ifort
を以下に変更
FC = gfortran
もう一点、./binにできている「Makefile」というフィイルの42行目(一行上に# Linux Inter ifort Fortranと書いてある行)を
FC = ifort
を以下に変更
FC = gfortran
※------追記終わり------
以上、ビルドが終わったら./binに新たにできるxrotor,jplot,jploteをパスの通ったところつまり、/usr/local/binなどにいれてやると
% xrotor
と打つことでどこでも起動できる。
Ubuntuでインストール直後だったので/usr/local/binにアクセスするために
%sudo passwd
でパスワード設定することによりアクセスできるようする必要もあった。
実はwinで動くexe形式のXROTORは持ってるから必要ないんだけど、勉強だと思って弄ってた。
XFOILがGPLで公開されてからのXFLR5みたいにXROTORもUIを改良したソフトを誰か作ってくれればなと妄想中。
※※※ 追記 ※※※
Ubuntuのバージョンに限定はあるけど、インストールが簡単になりました。この記事は古いのでこっちがオススメです。
http://d.hatena.ne.jp/ina111/20111221/1324439520